Robotic platform for seal whisker sensor testing and ROS2 package that tracks and evaluates the 3D pose change of whisker sensors over time.
PythonROS2OpenCVPixhawkArduSubControlsBioinspirationSoft RoboticsComputer VisionRapid Prototyping
ROS2 package that interfaces with ArduSub to allow an AUV to autonomously navigate waypoints and avoid obstacles under water.
PythonROS2SLAMCMakePixhawkArduSubPath PlanningControls
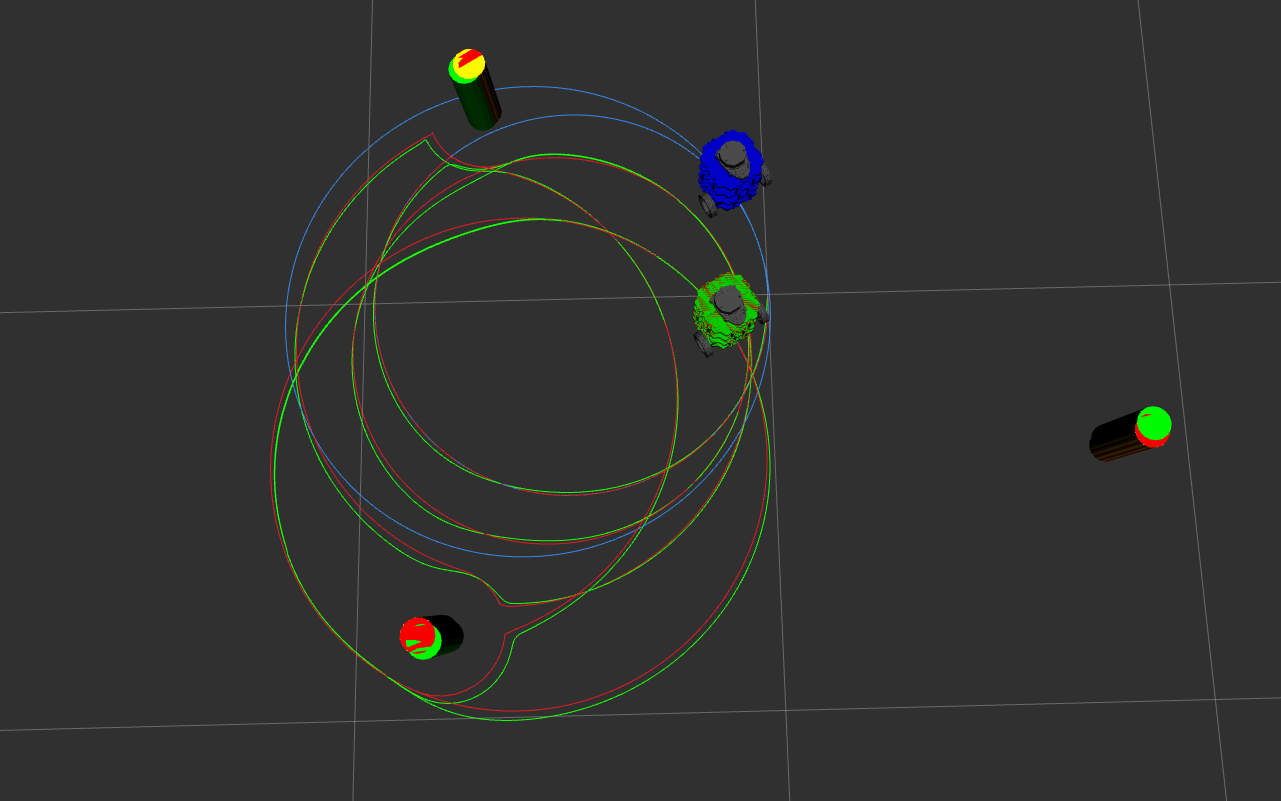
Developing a ROS2 C++ EKF SLAM package from scratch for a turtlebot3 and simulated environment.
ROS2C++RVIZKinematicsLiDARKinematicsMachine Learning
ROS2 package and services allowing Franka Emika arm to facilitate a game of hangman with a human player.
PythonROS2OpenCVEmbedded SystemsCAD
Control algorithm to pick and place a cube with a Kuka youBot simulated in Coppeliasim.
PythonCoppeliaSimKinematicsMotion PlanningPath PlanningTrajectory Generation
Dynamically generating and evolving a simulated organism based on fitness.
MuJoCoPythonXMLEvolutionary AlgorithmsDynamic Generation